1. Cách đấu dây và trường hợp sử dụng
Tùy thuộc vào lưới điện sử dụng và cấp điện áp của động cơ.
a. Đấu sao
b. Đấu tam giác
2. Cách xác định đầu dây
3. Kiểm tra động cơ
4. Đấu đông cơ 3 pha thành 1 pha
5. Đảo chiều động cơ
6. Mạch sao tam giác
7. Bảo vệ mất pha, thấp áp
8. Mạch chạy luân phiên
9. Đấu biến tần cho động cơ
10. Mạch hãm ngược
11.Nguyên tắc an toàn của mạch điều khiển
6.5.19
Những nội dung cần chú ý trong động cơ điện 3 pha không đồng bộ
Những nội dung cần chú ý trong động cơ điện 1 pha
1. Các loại động cơ điện 1 pha
- Dựa vào cấu tạo và cách khởi động đông cơ được phân loại thành
2. Cách xác định đầu dây của các dây ra trên động cơ
- Cuộn đề thường có điện trở lớn hơn cuộn chạy
- Dùng sử dụng VOM đo điện trở để xác định từng cuộn
- Đo thông mạch để xác định từng cặp
- Nếu điện trở gần như bằng 0 thì thuộc bộ ngắt điện ly tâm
3. Đấu dây bộ khởi động động cơ 1 pha

Động cơ khởi động với tụ dầu

- Tụ mồi (phóng): thường trên thân có ghi thông số là tụ khởi động ( Motor starting ), kích thước nhỏ hơn tụ chạy, được bọc cách điện, đơn vị của tụ là MFD (CAP: 40 MFD)
- Tụ chạy: Kích thước lớn, không có lớp bọc cách điện bằng nhựa, thông số độ lớn tụ bằng đơn vị Fara.

Động cơ khởi động với chỉ cuộn phụ (không có tụ)
- Công suất không quá 1 HP
- Động cơ khởi động ly tâm (có ngắt điện ly tâm) với một cuộn phụ
- Động cơ khởi động với tụ dầu
- Động cơ khởi động với tụ hoá có ngắt điện ly tâm
- Động cơ khởi động với 2 tụ có ngắt điện ly tâm
- Động cơ khởi động với vòng ngắn mạch
- Động cơ khởi động đẩy - cảm ứng (roto quấn dây - cổ góp)
- Động cơ đẩy (roto quấn dây - cổ góp)
2. Cách xác định đầu dây của các dây ra trên động cơ
- Cuộn đề thường có điện trở lớn hơn cuộn chạy
- Dùng sử dụng VOM đo điện trở để xác định từng cuộn
- Đo thông mạch để xác định từng cặp
- Nếu điện trở gần như bằng 0 thì thuộc bộ ngắt điện ly tâm
3. Đấu dây bộ khởi động động cơ 1 pha
- Động cơ khởi động với tụ hoá (có bộ ngắt điện ly tâm)
- Động cơ khởi động với 2 tụ
- Tụ mồi (phóng): thường trên thân có ghi thông số là tụ khởi động ( Motor starting ), kích thước nhỏ hơn tụ chạy, được bọc cách điện, đơn vị của tụ là MFD (CAP: 40 MFD)
- Tụ chạy: Kích thước lớn, không có lớp bọc cách điện bằng nhựa, thông số độ lớn tụ bằng đơn vị Fara.

4. Đảo chiều động cơ
Cần phải đảo chiều từ trường quay bằng cách đảo chiều dòng điện trong cuộn chính hoặc cuộn phụ.
5. Cách đấu đay động cơ 1 pha 2 cấp điện áp 110/220V 6 dây

5.5.19
Cách đấu biến tần cơ bản ( Biến tần FR - D700 )
1. Giới thiệu chung về biến tần
Là thiết bị dùng để biến đổi tần số của nguồn điện sử dụng cho động cơ, nhằm điều khiển tốc độ động cơ, tích hợp các chức năng mở rộng như điều khiển thuận nghịch, điều khiển bằng thiết bị ngoại vi hoặc điều khiển số, bảo vệ quá tải.
2. Đấu nối biến tần
- Về cơ bản ta chỉ cần cấp nguồn vào cho biến tần và đấu nguồn ra của biến tần vào động cơ là có thể điều khiển được tốc độ động cơ bằng vài thao tác cài đặt thông số của biến tần thông qua bộ cài đặt trên biến tần.
- Trước khi đấu nối cần nghiên cứu công suất, điện áp động cơ, của biến tần.
- Download tài liệu hướng dẫn của loại biến tần về để nghiên cứu, chú ý phần đấu nối dây và phần bảng thông số cài đặt biến tần.
- Trong phần thông số cài đặt chú ý nhất phần chế độ điều khiển, để khi cài đặt được chế độ điều khiển đúng, biến tần mới hoạt động được.
3. Đấu nối trên biến tần FR - D700
Sơ đồ đấu nối

Bảng cài đặt


- Trước tiền lắp nguồn vào, nguồn ra của biến tần.
- Sau đó tuỳ vào mục đích sử dụng, phương pháp điều khiển, cài đặt chế độ Operation mode selection phù hợp, lắp đặt các bộ phận ngoại vi.
3. Mạch điều khiển ngoại vi thuận, nghịch cho biến tần
Nên sử dụng mạch khoá chéo để bảo vệ biến tần, nếu động cơ lớn nên sử dụng thêm timer để đảm bảo động cơ dừng hẳn rồi mới quay nghịch
4. Điện trở thắng
- Tuỳ vào động cơ sử dụng ở mục đich nào, nếu kéo tải lớn, thường xuyên dừng chạy liên tục, đảo chiều, thường động cơ sẽ tạo ra điện năng như máy phát trả ngược về biến tần gây hiện tượng quá áp tức thời, dễ gây báo lỗi biến tần, nên cần lắp thêm Điện trở thắng để hấp thụ năng lượng này nhằm bảo vệ biến tần.
Là thiết bị dùng để biến đổi tần số của nguồn điện sử dụng cho động cơ, nhằm điều khiển tốc độ động cơ, tích hợp các chức năng mở rộng như điều khiển thuận nghịch, điều khiển bằng thiết bị ngoại vi hoặc điều khiển số, bảo vệ quá tải.
2. Đấu nối biến tần
- Về cơ bản ta chỉ cần cấp nguồn vào cho biến tần và đấu nguồn ra của biến tần vào động cơ là có thể điều khiển được tốc độ động cơ bằng vài thao tác cài đặt thông số của biến tần thông qua bộ cài đặt trên biến tần.
- Trước khi đấu nối cần nghiên cứu công suất, điện áp động cơ, của biến tần.
- Download tài liệu hướng dẫn của loại biến tần về để nghiên cứu, chú ý phần đấu nối dây và phần bảng thông số cài đặt biến tần.
- Trong phần thông số cài đặt chú ý nhất phần chế độ điều khiển, để khi cài đặt được chế độ điều khiển đúng, biến tần mới hoạt động được.
3. Đấu nối trên biến tần FR - D700
Sơ đồ đấu nối
- Trước tiền lắp nguồn vào, nguồn ra của biến tần.
- Sau đó tuỳ vào mục đích sử dụng, phương pháp điều khiển, cài đặt chế độ Operation mode selection phù hợp, lắp đặt các bộ phận ngoại vi.
3. Mạch điều khiển ngoại vi thuận, nghịch cho biến tần
Nên sử dụng mạch khoá chéo để bảo vệ biến tần, nếu động cơ lớn nên sử dụng thêm timer để đảm bảo động cơ dừng hẳn rồi mới quay nghịch
4. Điện trở thắng
- Tuỳ vào động cơ sử dụng ở mục đich nào, nếu kéo tải lớn, thường xuyên dừng chạy liên tục, đảo chiều, thường động cơ sẽ tạo ra điện năng như máy phát trả ngược về biến tần gây hiện tượng quá áp tức thời, dễ gây báo lỗi biến tần, nên cần lắp thêm Điện trở thắng để hấp thụ năng lượng này nhằm bảo vệ biến tần.
Cấu hình phần cứng cho PLC, WinCC trên Tia Portal v15.1
1. Khởi động Tia Portal v15.1 lên, Chọn Create new project, thiết lập tên, nơi lưu trữ, sau đó chọn Create.

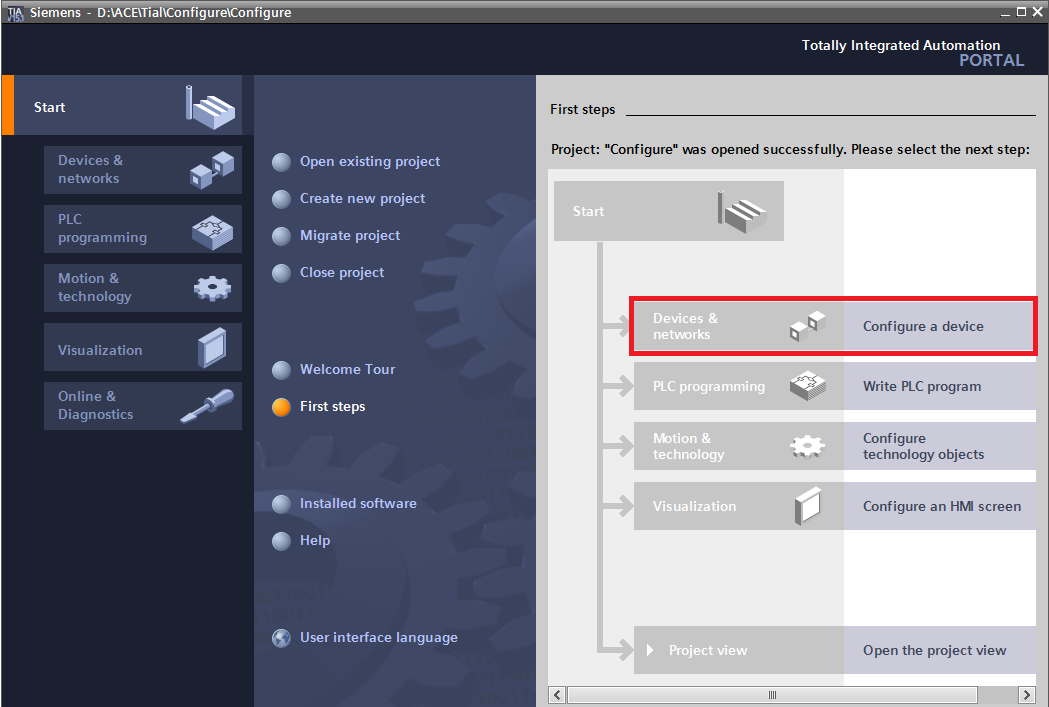
2. Cửa sổ First steps xuất hiện, chọn Configure a device.




6. Chọn các Module cần thêm vào hệ thống như Module Nguồn, DI, DO, Analog... bằng cách chọn, giữ chuột kéo thả vào các block.



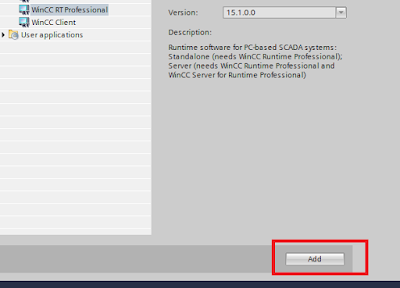
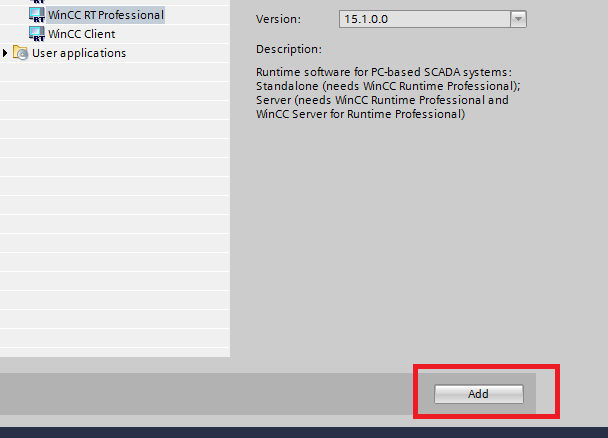
8. Tiếp tục chọn PC systerm, Chọn WinCC RTprofessional, sau đó chọn Add để thêm WinCC vào.











2. Cửa sổ First steps xuất hiện, chọn Configure a device.
3. Chọn Add new device, sau đó chọn Controller.

4. Chọn loại PLC cần sử dụng, Version.

5. Kéo thanh trượt xuống, chọn Add.



7. Sau đó chọn Portal View ở góc trái bên đưới cửa sổ.


9. Kế tiếp ta thêm Module truyền thông Internet cho WinCC, bằng cách kéo thả vào block.


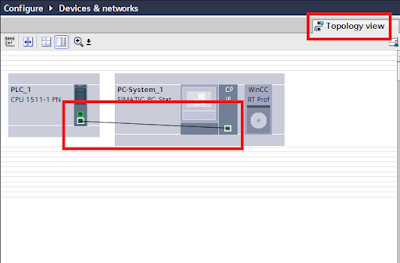
10. Sau đó ta nhấp chọn tab Topology view dể tạo kết nối cho hệ thống bằng cách giữ chuột ở biểu tượng cổng kết nối trên PLC kéo thả sang cổng còn lại của WinCC.


Sau đó chọn sang tab Network view.
12. Chọn Connections, sau đó nhấp chuột vào vùng màu xanh da trời của PLC, giữ chuột kéo thả sang vùng màu xanh da trời của Wincc để tạo kết nối.


Sau khi hoàn thành hệ thống sẽ hiển thị như sau.

13. Chọn Hệ thống PLC, sau đó chọn Compile để Debug lỗi.

14. Quan sát phía dưới cửa sổ sẽ có thông báo Compile hoàn tất ( Error: 0 ) là được.

15. Tương tự với Hệ thống WinCC.

Bây giờ có thể viết chương trình và tiến hành mô phỏng được rồi.
Chú ý:
- Nếu không cần thiết hệ thống WinCC thì có thể bỏ qua các bước thiết lập cho WinCC.
- Trên đây là cấu hình đơn giản để thực hiện mô phỏng.
Các cấp điện áp được sử dụng ở Việt Nam
Các cấp điện áp
- Nguồn điện lưới nhỏ hơn 1 kV là hạ thế
- Từ 1kV đến 66kV là trung thế
- Lớn hơn 66kV là cao thế
- Cao thế có 4 mức: 66kV, 110kV, 220kV và 500kV
- Trung thế có 5 mức: 6kV, 10kV, 15kV, 22kV và 35 kV
- Hạ thế có 2 mức: 0,4kV và 0,2kV

3.5.19
Tính toán Tụ Bootstrap theo hãng IRF (Calculating the Bootstrap Capacitor according to IRF)
Sản phẩn của IRF được sử dụng với thông số tụ Bootstrap:
Điện tích của tụ Bootstrap Qbs:

Trong đó:
Qbs = Điện tích của tụ Bootstrap
Qg = Điện tích nạp của cực Gate ở High side driver (Xem Datasheets của Mosfet)
Icbs(leak) = Dòng rò qua tụ Bootstrap (Đối với tụ gốm Icbs(leak)=0)
f = Tần số PWM
Qls = Điện tích cần cho mỗi chu kỳ trong bộ Leve shift của Driver lái MOSFET đối với các diver lái của hãng IRF là 5nC với IC 500V/600V và 12nC với IC 1200V
Iqbs(max) = Dòng điện định mức ở High side driver (Xem Datasheets của Driver mạch lái).

Vcc = Điện áp Vcc của Driver lái
Vf = Điện áp ngược rơi trên Diot Bootstrap (Xem Datasheets của Diode)
VLS = Điện áp rơi trên low side Mosfet hoặc tải cho high side (Là giá trị Rds(on),max*Id)
Qg = Điện tích nạp của cực Gate ở High side driver (Xem Datasheets của Mosfet)
Icbs(leak) = Dòng rò qua tụ Bootstrap (Đối với tụ gốm Icbs(leak)=0)
f = Tần số PWM
Qls = Điện tích cần cho mỗi chu kỳ trong bộ Leve shift của Driver lái MOSFET đối với các diver lái của hãng IRF là 5nC với IC 500V/600V và 12nC với IC 1200V
Iqbs(max) = Dòng điện định mức ở High side driver (Xem Datasheets của Driver mạch lái).
Độ lớn tụ Bootstrap:

Trong đó:
Vcc = Điện áp Vcc của Driver lái
Vf = Điện áp ngược rơi trên Diot Bootstrap (Xem Datasheets của Diode)
VLS = Điện áp rơi trên low side Mosfet hoặc tải cho high side (Là giá trị Rds(on),max*Id)
Vmin = Điện áp nhỏ nhất giữa VB và VS là giá trị VBSUV+,MAX của Driver lái Mosfet (Xem trong Datasheets của driver lái)
Giá trị tụ Bootstrap theo khuyến cáo lớn hơn 15 lần so với giá trị tụ Bootstrap nhỏ nhất (Cbs,min).
Qg = 146nC
Iqbs(max) = 150uA
Qls = 5nC
f = 20kHz
Vcc = 15V
Vf = 1V
Vls = Rds(on),max*Id = 8m ohm *110 = 0.88V
Vmin = VBSUV+,MAX = 9.8V
Icbs(leak) = 0 (sử dụng tụ gốm làm tụ Bootstrap)
Giá trị tụ Bootstrap theo khuyến cáo lớn hơn 15 lần so với giá trị tụ Bootstrap nhỏ nhất (Cbs,min).
Ví dụ tính toán Cbs cho cầu H dùng Mosfet IRF3205, driver lái là IC IR2184 và sử dụng Diode Bootstrap là Diode HER203, f = 20kHz, Vcc = 15V.
Dựa vào Datasheets của 3 linh kiện trên ta có các thông số sau:Qg = 146nC
Iqbs(max) = 150uA
Qls = 5nC
f = 20kHz
Vcc = 15V
Vf = 1V
Vls = Rds(on),max*Id = 8m ohm *110 = 0.88V
Vmin = VBSUV+,MAX = 9.8V
Icbs(leak) = 0 (sử dụng tụ gốm làm tụ Bootstrap)
Ta tính toán được các giá trị sau:
Qbs = 2*(2*146nC+ (150uA/20000) + 5nC) = 0.609uCCbs,min = 0.609uC/(15-1-0.88-9.8) = 0.1834uF
Vậy Cbs = 15*0.1834uF = 2.75uF approximately 3.3 uF
Tài liệu được biên soạn dựa vào các tài liệu sau :
[1].Bootstrap Component Selection For Control IC’s, IRF
[2].Design Guide for Selection of Bootstrap Components, FAIRCHILDTần số PWM phù hợp với động cơ
Để chọn được thông số PWM phù hợp với động cơ ta cần biết được thông số độ L, R của động cơ. Trong đó L là thông số điện cảm và R là thông số điện trở nội của động cơ, thường sẽ có trong Datasheets, nếu không thì phải dùng các thiết bị đo để xác định thông số.
Tần số phù hợp với động cơ
Tần số phù hợp với đồng cơ là khi tần số đủ để làm cho quán tính và điện cảm của động cơ khi hoạt động không gây ra tiếng ồn và động cơ tỏa nhiệt ít. Khi tần số quá cao, động cơ sẽ tỏa nhiều nhiệt gây mất mát năng lượng giảm hiệu suất của động cơ, Khi tần số quá thấp thì động cơ sẽ phát ra tiếng kêu do quán tính động cơ cản trở, gây mất ổn định kết cấu cơ khí. Tần số phù hợp để PWM khoảng trên 20Khz.
Phương pháp tính toán lựa chọn tần số động cơ
Tần số phù hợp để PWM được kiến nghị cao hơn 5 lần tần số quay của động cơ. Tần số PWM được tính như sau:
Tần số PWM > 5/Ta
Ta = R/L
R: Điện trở nội của động cơ
L: Thông sô điện cảm của động cơ
Tổng quan về DS1307, I2C và lập trình I2C trên Pic bằng CCS
Tổng quan về DS1307
1. Sơ đồ chân:

X1, X2: Kết nối với thạch anh tạo xung dao động
VBAT : Ngõ ra kết nối với Pin để duy trì bộ đếm thời gian thực.
GND : Nối đất, nguồn âm.
Vcc : Nối nguồn (Nguồn để truyền dữ liệu)
SQW/OUT: Chân xuất xung vuông từ DS1307 ra ngoài
SCL : Chân clock để truyền dữ liệu
SDA : Chân dữ liệu.
2. Sơ đồ kết nối với các linh kiện ngoại vi
- Chân SQW/OUT nếu không sử dụng có thể để trông không kết nối với các bộ phận ngoại vi khác.
- Nguồn sử dụng: Nguồn DC điện áp nằm trong khoảng 4.5V đến 5.5V.
- Thạch anh có độ lớn 32.768 kHz.

3. RAM lưu trữ và điều khiển DS1307 (RTC RAM)

- RTC RAM có địa chỉ từ 00H-08H
- Dữ liệu được lưu trữ dưới dạng BCD.
- Có thể hiển thị dưới dang 12h/24h.
- Truyền dữ liệu thông qua chuẩn truyền thông I2C.
4. Chuẩn truyền thông I2C:
Một thiết bị gửi dữ liệu trên một dây đẫn được định nghĩa là thiết bị truyền và thiết bị nhận dữ liệu là thiết bị nhận. Thiết bị điều khiển dữ liệu gửi được gọi là Master. Thiết bị chịu sự điều khiển của Master gọi là Slave.
Dây dẫn phải được điều khiển bởi Master phát một xung clock (SCL), xung clock gồm có Start bit, và Stop bit. DS1307 hoạt động như một Slave.

5. Điều kiện để dữ liệu có thể truyền dẫn trên chuẩn I2C:
Những điều kiện:
- Đường truyền rảnh: Cả hai dây dẫn SCL (clock) và SDA (dữ liệu) ở mức cao (HIGH).
- Bắt đầu truyền dữ liệu (Start bit): Thay đổi trạng thái ở dây dữ liệu (SDA), từ Cao xuống Thấp.
- Dừng việc truyền dữ liệu (Stop bit): Thay đổi trạng thái ở dây dữ liệu (SDA), ở mức thấp (LOW) sang mức cao (HIGH).
- Dữ liệu hợp lệ: Dữ liệu chỉ có giá trị sau khi co điều kiện truyền dữ liệu (Start bit), Dữ liệu có mức không thay đổi (mức logic không đổi) trong khi xung clock (SCL) ở mức Cao, Dữ liệu có thể thay đổi mức logic khi xung clock (SCL) ở mức Thấp, 1 xung clock tương đương với 1 bit dữ liệu.
- Dữ liệu truyền không giới hạn.
- Khi nhận được dữ liệu, sẽ có một tín hiệu phản hồi (Acknowledges, ACK) trên dây SDA nhằm xác nhận việc đã nhận dữ liệu thành công.
6. Cấu trúc dữ liệu:
Có 2 loại truyền dữ liệu có khả năng:
a. Slave nhận dữ liệu:
Dữ liệu nối tiếp nhận được thông qua 2 chân SCL và SDA. Sau khi mỗi Byte đữ liệu được nhận sẽ có 1 ACK (bit xác nhận) được truyền đi. Start và Stop được công nhận như bắt đầu và kết thúc của việc truyền dữ liệu nối tiếp. Phần mềm sẽ xác định địa chỉ Slave và bit điều khiển. Byte địa chỉ là byte đầu tiên nhận được sau khi có điều kiện Start. Địa chỉ Slave bao gồm 7 bit đia chỉ Ds1307, với 1101000, theo sau đó là bit điều khiển đọc/ghi, ghi là 0, đọc là 1. Sau khi nhận và giải mã byte địa chỉ Slave. Ds1307 xuất ra 1 tín hiệu xác nhân (ACK) trên SDA. Sau khi xác nhận (ACK) địa chỉ Slave và bit điều khiển (ghi), Master truyền dữ liệu trên chân SDA Ds1307. Khi kết thúc việc gửi dữ liệu Master sẽ gửi một Stop bit để kết thúc việc gửi.
b. Slave truyền dữ liệu:
Byte đầu tiên đã được nhận và xử lý trên Slave. Trong trường hợp này, bit điều khiển sẽ được cho biết rằng điều khiển truyền được đảo ngược ( Dữ liệu sẽ bị đảo ngược khi nhận được, MSB bit sẽ được truyền đầu tiên). Ds1307 sẽ truyền dữ liệu nối tiếp trên SDA khi nhận được xung clock ở SCL. Điều kiện Start and Stop được công nhận như là bắt đầu và kết thúc của truyền nối tiếp. Byte địa chỉ Slave sẽ là byte đầu tiên nhận được sau khi điều kiện Start được phát ra bởi Master. Địa chỉ Slave là 1101000, theo sau là bit điều khiển đọc/ghi, nó là 1 khi đọc dữ liệu từ Slave. Sau khi nhận và giải mã địa chỉ Slave, Ds1307 sẽ xuất một xung xác nhận (ACK) trên SDA. Ds1307 sẽ bắt đầu truyền dữ liệu bắt đầu với con trỏ dữ liệu, nếu con trỏ dữ liệu không được ghi trước khi bắt đầu đọc dữ liệu thì dữ liệu sẽ được truyền ở địa chỉ đầu tiên mà nó đã đọc lần cuối cùng mà nó có sẵn trên con trỏ dữ liệu (đọc từ vị trí 00H). Ds1307 phải nhận được một tín hiệu “Không xác nhận” (NOT ACK) để kết thúc việc đọc.



1. I2C trên Pic
Tham khảo code của mình tại đây:
Ưu tiên ngắt trong CCS
Khi lập trình Pic trên CCS nhiều trường hợp ta sử dụng nhiều ngắt để xử lý, khi xung đột ngắt trong chương trình xảy ra ta phải ưu tiên cho ngắt nào được thực hiện. Trong CCS có các lệnh như sau:
#priority ints
Trong đó ints là các ngắt được ưu tiên theo thứ tự từ trái sang phải.
Ví dụ:
#priority ints
Trong đó ints là các ngắt được ưu tiên theo thứ tự từ trái sang phải.
Ví dụ:
#priority rtcc,rb
Thì ngắt rtcc được ưu tiên hơn ngắt rb. Ngoài ra trong Pic 18 có thêm các lệnh sau:
#device high_ints=true
#int_xxx fast hoặc high
Trong đó lệnh:
#device high_ints=true
Sử dụng để bật tắt chế độ cho phép ưu tiên ngắt trong Pic 18
Có 3 mức ưu tiên : Thấp, trung bình và cao được quy định trong lệnh #int_xxx (int_xxx là loại ngắt sử dụng vd : #int_ext1, #int_timer1...) với fast là mức cao nhất, chỉ được một ngắt nào đó được ưu tiên mức này, high tương ứng với mức trung bình có thể đặt cho nhiều loại ngắt trong cùng một chương trình, với mức thấp là tất cả các ngắt còn lại.
Nhằm tránh trường hợp đang thực hiện một ngắt, xảy ra ngắt khác đồng thời, lúc đó chương trình sẽ thoát ra khỏi ngắt đang chạy chạy đến ngắt ưu tiên hơn, điều này rất dễ gây lỗi cho chương trình khi hoạt động, ta nên thêm các lệnh disable_interrupts(các ngắt khác) và enable_interrupts(các ngắt khác) vào đầu và cuối chương trình ngắt để tránh hiện tượng trên.
Nhằm tránh trường hợp đang thực hiện một ngắt, xảy ra ngắt khác đồng thời, lúc đó chương trình sẽ thoát ra khỏi ngắt đang chạy chạy đến ngắt ưu tiên hơn, điều này rất dễ gây lỗi cho chương trình khi hoạt động, ta nên thêm các lệnh disable_interrupts(các ngắt khác) và enable_interrupts(các ngắt khác) vào đầu và cuối chương trình ngắt để tránh hiện tượng trên.
Một số quy tắc cơ bản trong thiết kế PCB Layout
1. Tụ bypass
- Đặt sát chân nguồn IC, cực dương và cực âm của tụ nối mass phải ngắn nhất có thể.
- Đặt và đi dây sao cho đảm bảo dòng điện phải đi từ nguồn qua tụ rồi mới vào đến chân nguồn của IC.
2. Tín hiệu xung clock, thạch anh, ADC.
- Có 2 dây mass bảo vệ 2 bên (Guard rings), khoảng cách của dây mass đến dây tín hiệu là lớn hơn hoặc bằng 0,5mm.
- Dây hạn chế bị gấp khúc, càng ngắn và thẳng càng tốt.
- Trường hợp mạch nhiều lớp thì khoảng 20 - 30mm cần có 1 Via mass.
- Phía dưới bụng IC clock, thạch anh, RTC không được chạy dây qua ( bất kể là dây gì).
3. Mạch nguồn vào
- Các tụ lọc nguồn sắp xếp theo thứ tự dung lượng tụ, càng nhỏ càng gần IC nguồn.
- Cần cách ly bộ nguồn và mạch tín hiệu
4. Tín hiệu tốc độ cao (Encoder, RS232, RS485, RS422...)
- Càng ngắn càng tốt.
- Có 2 dây mass bảo vệ 2 bên, khoảng cách của dây mass đến dây tín hiệu là lớn hơn hoặc bằng 0,5mm.
- 2 dây tín hiệu đi song song với nhau và không có gì chen giữa 2 dây tín hiệu (trường hợp 2 dây tín hiệu vd Rs232, Rs422..).
- Tín hiệu tốc độ rất cao thì độ dài 2 dây tín hiệu phải bằng nhau.
5. Dây Reset
- Có 2 dây mass bảo vệ 2 bên (Guard rings), khoảng cách của dây mass đến dây tín hiệu là lớn hơn. hoặc bằng 0,5mm hoặc khoảng cách của dây Reset đến dây khác lớn hơn 2 lần độ lớn của đường dây.
6. Dây nguồn
- Tùy theo độ lớn của dòng điện mà ta sử dụng dây nguồn lớn cỡ nào, nhưng luôn lớn hơn dây tín hiệu ít nhất 2 lần nhằm tránh sụt áp và đảm bảo dòng ổn định cho mạch hoạt động.
7. Các linh kiện sử dụng tay để tác động như nút nhấn, jumper, test point
- Đặt ở nơi dễ chạm tay đến, tránh đặt quá gần những linh kiện có độ cao lớn hơn hoặc nhỏ hơn 5mm, tốt nhất là lớn hơn 1mm.8. Không nên dùng chế độ đi dây tự động
Chạy dây tự động sẽ làm sai lệch với sơ đồ nguyên lý của mạch, không đảm bảo yếu tố chống nhiễu, kích thước dây nguồn mass, return mass ảnh hưởng rất lớn đến hoạt động của boardChống nhiễu cho Encoder (Reduce noise in Encoder)
Phương pháp chống nhiễu khi đọc xung encoder.
Ví dụ chương trình đọc encoder trên PIC sử dụng CCS để lập trình:
#int_ext
void ext_tinterrupts()
{
value++;
}
2. Phương pháp chống nhiễu cho encoder:
Có hai phần chính: chống nhiễu phần cứng và phần mềm.
a. Chống nhiễu phần cứng:
Chống nhiễu phần cứng gồm nhiều phần: thiết kế layout, dây dẫn điện, mạch chống nhiễu...
- Layout PCB đối với đây tín hiệu Encoder phải được bọc mass, đi dây thẳng ngắn nhất, cách ly mass được càng tốt.
-Nguồn nuôi encoder nên lấy riêng tránh sử dụng chung nguồn với nguồn động cơ, nếu sử dụng chung cần cách ly mát sử dụng các tụ lọc tần số cao để lọc bớt xung tần số cao.
-Ở điểm ra của 2 pha encoder cần có thêm một tụ lọc tần số cao (tùy thuộc tần số xung encoder mà ta chọn một tụ phù hợp).
-Nguồn nuôi encoder có thêm một tụ lọc ở nguồn và đất.
-Chân nguồn của vi xử lý cần có môt tụ 104 để lọc nhiễu.
-Dây tín hiệu không được ở quá gần dây đông cơ, dây nguồn nuôi encoder sử dụng dây cáp xoắn đôi.

b. Chống nhiễu phần mềm:
-Sử dụng các thuật toán tính trung bình kết hợp với tăng đáp ứng, loại bỏ ngưỡng sai số.
Vì khi sử dụng thuật toán tính trung bình thì thời gian đáp ứng của hệ thống sẽ chậm hơn.
-Phương pháp trung bình:
n[5]=n[4];
n[4]=n[3];
n[3]=n[2];
n[2]=n[1];
n[1]=n[0];
n[0]=value;
}
s=(n[0]+n[1]+n[2]+n[3]+n[4]+n[5])/6;
-Loại bỏ ngưỡng sai số: là khi tín hiệu xung bị sai lệch ở một sai số cho phép (ví dụ 1 đến 2 xung) ta sẽ bỏ qua không tính đến.
-Tăng đáp ứng bằng cách khi đếm số xung nếu phát hiện số xung thay đổi quá lớn qua một ngưỡng cho phép (tùy vào encoder có số xung bao nhiêu) ta bỏ qua tính trung bình, lấy giá trị xung đọc được tính toán cho hệ thống luôn.
Ví dụ về kết hợp cả ba thuật toán:
if(abs(value-s)>3)
{
if(abs(value-s)>50)
{
for(i=0;i<6;i++)
{
n[i]=value;
}
}
else
{
n[5]=n[4];
n[4]=n[3];
n[3]=n[2];
n[2]=n[1];
n[1]=n[0];
n[0]=value;
}
s=(n[0]+n[1]+n[2]+n[3]+n[4]+n[5])/6;
}
1. Phương pháp đọc xung encoder:
Thông thường để đọc encoder ta sử dụng vi xử lý, trong chương trình vi xử lý sử dụng ngắt ngoài để đếm xung encoder.Ví dụ chương trình đọc encoder trên PIC sử dụng CCS để lập trình:
#int_ext
void ext_tinterrupts()
{
value++;
}
2. Phương pháp chống nhiễu cho encoder:
Có hai phần chính: chống nhiễu phần cứng và phần mềm.
a. Chống nhiễu phần cứng:
Chống nhiễu phần cứng gồm nhiều phần: thiết kế layout, dây dẫn điện, mạch chống nhiễu...
- Layout PCB đối với đây tín hiệu Encoder phải được bọc mass, đi dây thẳng ngắn nhất, cách ly mass được càng tốt.
-Nguồn nuôi encoder nên lấy riêng tránh sử dụng chung nguồn với nguồn động cơ, nếu sử dụng chung cần cách ly mát sử dụng các tụ lọc tần số cao để lọc bớt xung tần số cao.
-Ở điểm ra của 2 pha encoder cần có thêm một tụ lọc tần số cao (tùy thuộc tần số xung encoder mà ta chọn một tụ phù hợp).
-Nguồn nuôi encoder có thêm một tụ lọc ở nguồn và đất.
-Chân nguồn của vi xử lý cần có môt tụ 104 để lọc nhiễu.
-Dây tín hiệu không được ở quá gần dây đông cơ, dây nguồn nuôi encoder sử dụng dây cáp xoắn đôi.
b. Chống nhiễu phần mềm:
-Sử dụng các thuật toán tính trung bình kết hợp với tăng đáp ứng, loại bỏ ngưỡng sai số.
Vì khi sử dụng thuật toán tính trung bình thì thời gian đáp ứng của hệ thống sẽ chậm hơn.
-Phương pháp trung bình:
n[5]=n[4];
n[4]=n[3];
n[3]=n[2];
n[2]=n[1];
n[1]=n[0];
n[0]=value;
}
s=(n[0]+n[1]+n[2]+n[3]+n[4]+n[5])/6;
-Loại bỏ ngưỡng sai số: là khi tín hiệu xung bị sai lệch ở một sai số cho phép (ví dụ 1 đến 2 xung) ta sẽ bỏ qua không tính đến.
-Tăng đáp ứng bằng cách khi đếm số xung nếu phát hiện số xung thay đổi quá lớn qua một ngưỡng cho phép (tùy vào encoder có số xung bao nhiêu) ta bỏ qua tính trung bình, lấy giá trị xung đọc được tính toán cho hệ thống luôn.
Ví dụ về kết hợp cả ba thuật toán:
if(abs(value-s)>3)
{
if(abs(value-s)>50)
{
for(i=0;i<6;i++)
{
n[i]=value;
}
}
else
{
n[5]=n[4];
n[4]=n[3];
n[3]=n[2];
n[2]=n[1];
n[1]=n[0];
n[0]=value;
}
s=(n[0]+n[1]+n[2]+n[3]+n[4]+n[5])/6;
}
Website thiết kế mạch điện tử online
Với nhiều tiện ích được thiết kế phù hợp, không cần cài đặt chương trình nặng máy tính, bạn chỉ cần kết nối internet, bạn sẽ có một chương trình thiết kế mạch mạch mạnh mẽ, đầy đủ từ thiết kế mạch nguyên lý cho đến mạch layout.

Đừng ngại, nếu bạn chưa sử dụng bao giờ, vì có nhiều tutorial rất hay, hướng dẫn chi tiết với đầy đủ video, hình ảnh hướng dẫn chi tiết.


Rất mong sẽ giúp đỡ được nhiều người ham mê học hỏi trong lĩnh vực điện tử.
Hãy thử ngay tại website : Easyeda.com
Một số tutorial hướng dẫn: https://easyeda.com/Doc/Tutorial/introduction.htm#Schematics

Đừng ngại, nếu bạn chưa sử dụng bao giờ, vì có nhiều tutorial rất hay, hướng dẫn chi tiết với đầy đủ video, hình ảnh hướng dẫn chi tiết.


Hãy thử ngay tại website : Easyeda.com
Một số tutorial hướng dẫn: https://easyeda.com/Doc/Tutorial/introduction.htm#Schematics
Tài liệu về phần mềm CR-5000 và CR-8000 (thường gọi là BD và DF)
Giới thiệu
Phần mền Zuken: Là một phần mên chuyên thiết kế PCB toàn diện, đầy đủ mọi tính năng trong thiết kế mạch điện tử. Thường được sử dụng nhiều trong các Cty thiết kế mạch của Nhật Bản. Phiên bản CR5000 là phiên bản cũ giao diện khó sử dụng hơn CR8000.
Phiên bản CR5000 (BD)

Phiên Bản CR8000 (DF)
Tuy nhiên do vấn đề bản quyền nên phần mềm này ít phổ biến ở Việt Nam, cũng như tài liệu hướng dẫn sử dụng cũng khá ít ỏi, nhiều bạn khi mới tiếp xúc rất khó làm quen, mình có sưu tầm được một số tài liệu của 2 phần mềm này nên chia sẻ cho các bạn làm tài liệu nghiên cứu, học tập. Chúc các bạn thành công.
Link Download:Tài liệu
Khổ giấy tiêu chuẩn
Dưới đây là những khổ giấy tiêu chuẩn để sử dụng trong thiết kế
- A0: 841x1189
- A1: 594x841
- A2: 420x594
- A3: 297x420
- A4: 210x297
- B0: 1000x1414
- B1: 707x1000
- B2: 500x707
- B3: 353x500
- B4: 250x353
- B5: 176x250
Tạo khung bản vẽ trong Autocad
1. Xác định kích thước bản vẽ chuẩn để in
Các kích thước bản vẽ chuẩn: https://vned.blogspot.com/p/kho-giay-tieu-chuan.html
2.Vẽ khung bản vẽ

3.Tạo khung tên và sử dụng hatching để tăng tính thẩm mỹ cho khung bản vẽ
- Ta dùng lệnh O (OFFSET) vào trong 3 - 5 đơn vị

- Sau đó tạo khung tên tuỳ theo yêu cầu, ý thích của bạn
- Nhập tên người thiết kế, loại bản vẽ, tên bản vẽ, ngày thiết kế, tên công ty....
- Cuối cùng ta dùng hatching để tăng tính thẩm mỹ cho bản vẽ

- Khi có được khung bản vẽ A4 chuẩn rồi ta dùng lệnh copy và dùng thêm lệnh SC (SCALE) để tạo các khung bản vẽ A3, A2, A1, A0 khác.

- Về hệ số Scale sẽ được tính như sau:
Chiều dài hoặc chiều cao của khổ giấy ta muốn tạo / chiều dài hoặc chiều cao của khổ giấy ta Copy.
Như hình là chiều dài của khổ giấy A3 / chiều dài của khổ giấy A4.
- Sau khi tạo xong các khung bản vẽ chuẩn ta sẽ lưu thành 1 tệp riêng để sau này sử dụng, muốn lấy khung bản vẽ nào ta chỉ việc copy và paste.
Tối ưu cho Autocad chạy nhanh và mượt hơn
1. Nhấp phải vào biểu tượng logo của Autocad chọn Properties









Ta thêm dòng /nologo vào cuối của mục Target, mục đích khi khởi động Autocad sẽ chạy ẩn không hiển thị lên màn hình để giảm thời gian khởi động, tránh mất nhiều tài nguyên của máy tính.
2. Chuyển sang tab Compatibility, ở mục Privilege ta tích chọn vào Run this program as an administrator, mục đích cho Autocad sẽ hoạt động dưới quyền Admin tránh Windows giới hạn quyền hoạt động của nó.
3. Tìm đến thư mục cài đặt của Autocad của bạn, Nhấp phải vào thư mục Autodesk chọn Properties, chuyển sang tab Security, ở mục Group or user names ta chọn mục Users, sau đó chọn Edit, ở cột Allow ta tích chọn toàn bộ, sau đó bấm OK. Sau khi đã làm xong bạn nhấp vào mục Users, thì cột Permissions for User hiển thị như hình dưới là được.
4. Khởi động Autocad , sau khi khởi động xong, mở tuỳ chọn Options lên, sang tab System, nhấp chọn vào nút Graphics Performance
Nhấp ON và tích chọn hết, sau đó bấm OK, mục đích cho Autocad sử dụng Card Đồ hoạ máy tính để hoạt động mượt hơn.
5. Nhấp chuột phải vào thanh công cụ của Windows, chọn Start Task Manager
Ở tape Processes ta tìm đến tên các Processes như hình dưới:
Các Processes của Autocad chạy trên Windows
Kế tiếp nhấp chuột phải, chọn Set Priority : Realtime
Lưu ý: Bước này mỗi lần chạy Autocad đều phải thiết lập lại.
Trên đây là những phương pháp tối ưu cho Autocadkhởi đông nhanh chóng và hoạt động mượt mà hơn.
Subscribe to:
Comments (Atom)